
Gripper Unit for Collaborative Robots
Vacuum Gripper Unit for Collaborative Robots ZXP-X1
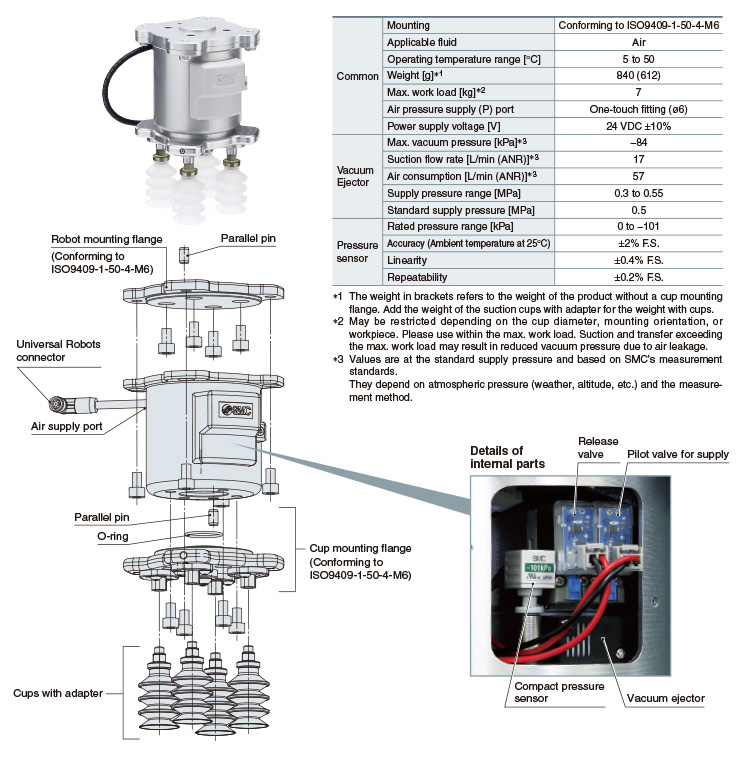
 | ・Plug & play configuration for immediate use URCaps compatible Easy programming ・Operate by simply connecting 1 compressed air supply tube and an electrical wiring M8 connector. ・Integrated vacuum ejector, air supply/release valve, pressure sensor, and cups ・Standards: ISO9409-1-50-4-M6 |
| Series | Cup form | Cup diameter | Suction flow rate [L/min(ANR)] | Air consumption [L/min(ANR)] |
|---|---|---|---|---|
| ZXP | Flat Flat with rib Bellows Thin flat Multistage bellows 5-stage bellows | φ8 to φ32 | 17 | 57 |

■Vacuum Gripper Unit for Collaborative Robots

■Specifications
■Adsorption Unit Variations

■The cup pitch can be changed.
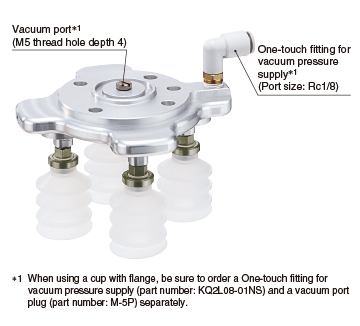
■The cup with flange can be used separately
(if using an external vacuum source).
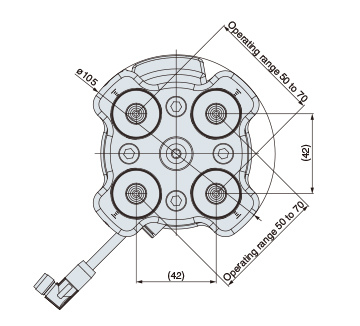
■Dimensions

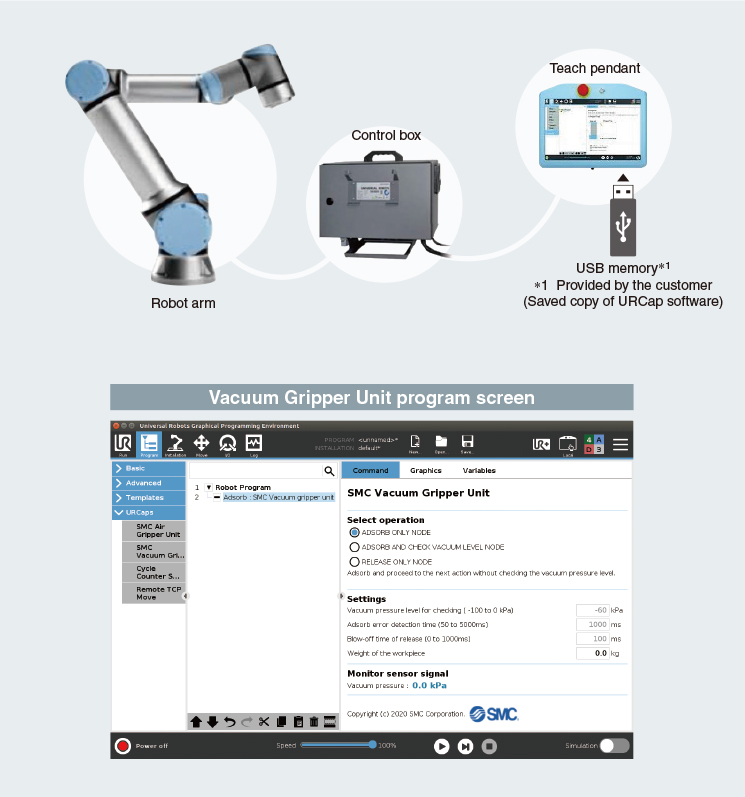
■URCap
Easy programming
By using the dedicated software certified for universal robots, URCap, the teaching pendant can conduct various operations intuitively, allowing for sensor signals to be easily incorporated.
Save a copy of the URCap software to a USB memory and insert it into the teaching pendant to easily install the software.
* Please download the URCap software from the website, and save it to a USB memory.
Vacuum Gripper Unit for Collaborative Robots ZXP-X1
- Product Code: ZXP-X1 Vacuum Gripper Unit for Collaborative Robots
- Availability: In Stock
-
-